Arduino avec servomoteur
En utilisant Arduino avec des servomoteurs, nous pouvons contrôler avec précision la position de son arbre car les servomoteurs fonctionnent sur un mécanisme de rétroaction pour déterminer sa position d'arbre. La position de l'arbre est constamment mesurée à l'aide d'un potentiomètre intégré à l'intérieur du servomoteur qui la compare à la position cible définie par le microcontrôleur (par exemple, l'Arduino). En calculant l'erreur entre la position cible et la position réelle, le microcontrôleur ajuste son arbre de sortie pour qu'il corresponde à la position cible. Tout ce système peut être décrit comme un système en boucle fermée .
Arduino contrôle les servomoteurs à l'aide d'un signal PWM. Ce signal de commande est transmis à la broche de commande du servomoteur. La largeur du signal PWM détermine la position de l'arbre. Le tableau ci-dessous donne une illustration du contrôle de position du servomoteur à l'aide du signal PWM
| Largeur PWM (ms) | Position de l'arbre (angle) |
|---|---|
| 1 milliseconde | 0˚ degré Min |
| 1,5 ms | 90˚ degrés Neutre |
| 2ms | 180˚ degrés maximum |
Les servomoteurs ont généralement besoin d'une impulsion PWM toutes les 20 ms ou 50 Hz. La plupart des servomoteurs RC peuvent fonctionner correctement dans une plage de 40 à 200 Hz.
Broches du servomoteur
La plupart des servomoteurs utilisés avec Arduino ont trois broches.
- Terrain Les servomoteurs ont une broche GND qui est normalement de couleur noire.
- Broche d'alimentation Une broche 5v est nécessaire pour alimenter le servomoteur. La broche d'alimentation est généralement de couleur rouge.
- Broche de contrôle Le mouvement de l'arbre du servomoteur est contrôlé à l'aide de la broche de commande. Cette broche est connectée à une broche numérique Arduino.
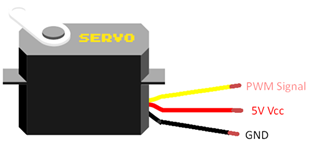
Les servomoteurs ont différents schémas de couleurs disponibles, mais la bonne nouvelle est que tous les servomoteurs ont des broches généralement dans le même ordre, seul le codage couleur est différent.
Fil Servo avec Arduino
La plupart des servomoteurs fonctionnent sur 5V. Pour alimenter le servo avec Arduino, nous devons connecter une broche 5V d'Arduino à la broche d'alimentation du servo. Arduino a une plage limitée pour tirer du courant. Habituellement, un ou deux moteurs peuvent être connectés à Arduino. Pour contrôler plusieurs servomoteurs à l'aide d'Arduino, nous devons les alimenter à l'aide d'une alimentation externe.
La configuration des broches suivante doit être gardée à l'esprit lors de l'alimentation du servo :
| Broche de servomoteur | Broche Arduino |
|---|---|
| Alimentation (rouge) | Broche 5V ou alimentation externe |
| Sol (noir ou marron) | Alimentation et Arduino GND |
| Broche de contrôle (jaune, orange ou blanche) | Broche numérique d'Arduino |
Pour connecter des servomoteurs avec Arduino, deux configurations sont possibles :
- Câble utilisant la broche Arduino 5V
- Câbler en utilisant une alimentation externe avec Arduino
Fil utilisant la broche Arduino 5V
Le servomoteur peut être alimenté à l'aide d'une broche Arduino 5V, mais une chose à surveiller est que l'Arduino peut donner un courant maximum de 500mA au servo. Si les moteurs consomment du courant au-delà de cette limite, l'Arduino se réinitialisera automatiquement et il pourrait également perdre de l'alimentation.
Voici la représentation picturale de la connexion Arduino avec servomoteur :
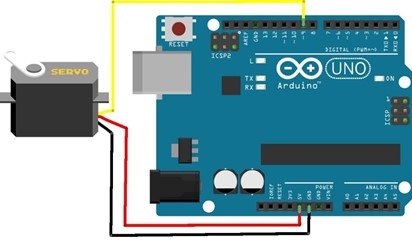
Ici, la broche numérique 9 d'Arduino est connectée à la broche de commande du servomoteur tandis que la broche d'alimentation et la broche GND du servo sont connectées respectivement aux broches 5V et GND d'Arduino.
Câbler en utilisant une alimentation externe avec Arduino
Arduino peut fournir un courant limité aux servomoteurs, c'est pourquoi nous devons connecter une alimentation externe. En utilisant une source d'alimentation séparée pour les servomoteurs, nous pouvons connecter autant de moteurs que nous le voulons avec Arduino, mais gardez à l'esprit les broches numériques disponibles sur les cartes Arduino. Si vous souhaitez connecter plusieurs servomoteurs, il est recommandé d'utiliser des blindages Arduino Mega ou Arduino qui peuvent fournir plus de broches pour gérer tous les moteurs.
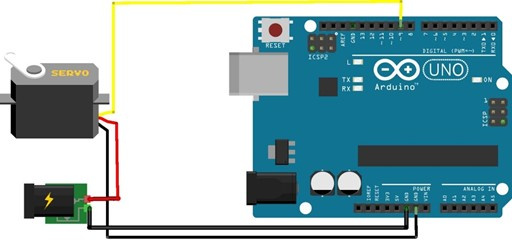
Ici, l'alimentation du servomoteur et la broche de terre sont connectées sur les broches d'alimentation externe tandis que la broche de commande est connectée à la broche numérique d'Arduino comme dans la configuration ci-dessus.
Conclusion
Les servomoteurs sont un excellent moyen de concevoir des projets de robotique. En raison de leur flexibilité concernant les mécanismes de contrôle, les utilisateurs d'Arduino ont la possibilité de concevoir des projets de leur choix. Un servomoteur peut être connecté à un Arduino en utilisant son alimentation et ses broches numériques. Alors que toujours rechercher les besoins énergétiques du moteur avant de le connecter à Arduino. Pour connecter plusieurs moteurs avec Arduino, vous devez utiliser une alimentation externe.