Avant de commencer à interfacer ESP32 avec le capteur PIR, nous devons savoir comment fonctionnent les interruptions et comment les lire et les gérer dans ESP32. Discutons en détail du fonctionnement du PIR avec ESP32.
Voici le contenu de cet article :
1 : Que sont les interruptions ?
1.1 : Interrompt les broches dans ESP32
2 : Appel d'une interruption dans ESP32 - MicroPython
3 : Interfaçage du capteur PIR avec ESP32 – MicroPython
3.1 : Capteur de mouvement PIR (HC-SR501)
1 : Que sont les interruptions ?
La plupart des événements qui se produisent dans la programmation ESP32 s'exécutent de manière séquentielle, ce qui signifie une exécution ligne par ligne du code. Pour gérer et contrôler les événements qui n'ont pas besoin de s'exécuter lors de l'exécution séquentielle du code et Interruptions sont utilisés.
Par exemple, si nous voulons exécuter une certaine tâche lorsqu'un événement spécial se produit, ou si un signal de déclenchement est donné aux broches numériques du microcontrôleur, nous utilisons l'interruption.
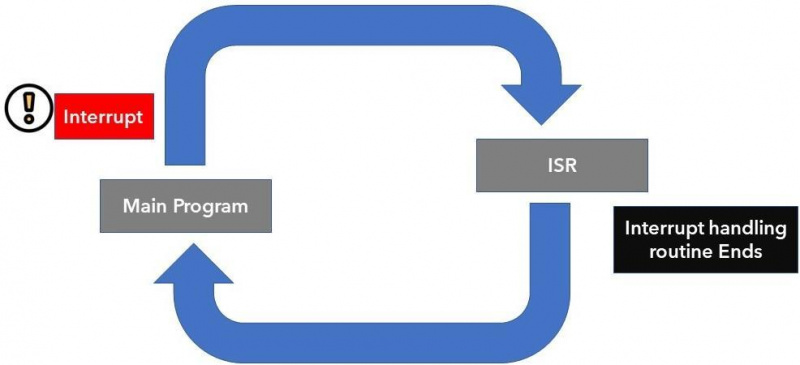
Avec l'interruption, nous n'avons pas besoin de vérifier en permanence l'état numérique de la broche d'entrée ESP32. Lorsqu'une interruption se produit, le processeur arrête le programme principal et une nouvelle fonction est appelée, appelée ISR ( Routine de service d'interruption ). Cette ISR La fonction gère l'interruption provoquée après ce retour au programme principal et commence à l'exécuter. L'un des exemples d'ISR est le capteur de mouvement PIR qui génère une interruption une fois qu'un mouvement est détecté.
1.1 : Interrompt les broches dans ESP32
Une interruption externe ou matérielle peut être causée par n'importe quel module matériel tel qu'un capteur tactile ou un bouton-poussoir. Les interruptions tactiles se produisent lorsqu'une touche est détectée sur les broches ESP32 ou une interruption GPIO peut également être utilisée lorsqu'une touche ou un bouton-poussoir est enfoncé.
Dans cet article, nous allons déclencher une interruption lorsque le mouvement est détecté à l'aide du capteur PIR avec ESP32.
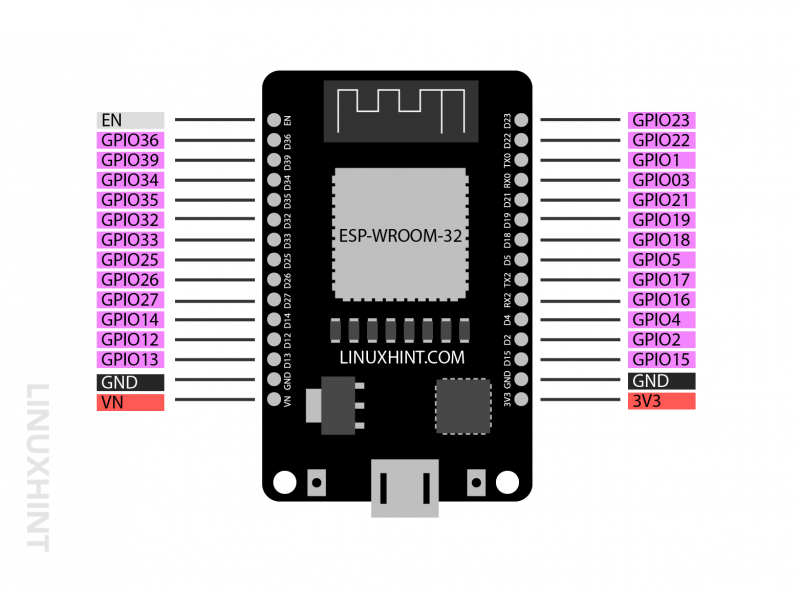
Presque toutes les broches GPIO sauf 6 broches intégrées SPI qui viennent généralement dans le 36 La version pin de la carte ESP32 ne peut pas être utilisée à des fins d'interruption d'appel. Ainsi, pour recevoir l'interruption externe, voici les broches que l'on peut utiliser dans ESP32 :
2 : Appel d'une interruption dans ESP32 à l'aide de MicroPython
Pour programmer une carte ESP32 avec capteur PIR en utilisant le code MicroPython. Nous devons définir une fonction d'interruption. Voici quelques étapes simples qui aident à définir une interruption pour la carte ESP32.
Étape 1 : Initialiser la fonction de gestion des interruptions : La fonction de gestion des interruptions doit être définie de manière simple afin qu'elle puisse s'exécuter rapidement et revenir au programme principal aussi rapidement que possible. Cela peut être fait en définissant une variable globale afin qu'elle soit accessible n'importe où dans le code si elle est appelée.
Ici, en cas de capteur PIR, nous utiliserons la broche GPIO comme global variable. La fonction d'interruption prendra une broche comme argument et décrira la broche GPIO qui provoque la fonction d'interruption.
def handle_interrupt ( broche ) :Étape 2 : Configurez la broche GPIO pour une interruption : Pour obtenir la valeur de la broche GPIO, nous devons créer un objet qui en prendra l'entrée en utilisant le Broche.IN comme deuxième argument dans notre classe pin. Nous pouvons renommer ceci avec n'importe quel autre.
broche = Broche ( 13 , Broche. DANS )Étape 3 : Attachez l'interruption à la broche GPIO pour le capteur PIR à l'aide de la méthode irq() :
En utilisant la commande ci-dessous, nous pouvons définir l'interruption sur une broche que nous avons définie précédemment.
le pont. irq ( gâchette = Broche. IRQ_RISING , gestionnaire = handle_interrupt )La irq() La méthode est utilisée pour attacher l'interruption à la broche. irq() accepte deux arguments différents :
- Gâchette
- Gestionnaire
gâchette: Cet argument explique le mode de déclenchement. Voici trois modes :
- Pin.IRQ_FALLING : Lorsqu'une broche passe de HIGH à LOW, une interruption est lancée.
- Pin.IRQ_RISING : Lors de la transition de la broche de LOW à HIGH, une interruption est lancée.
- Pin.IRQ_FALLING|Pin.IRQ_RISING : Déclenchez l'interruption chaque fois qu'une broche change d'état. L'une ou l'autre des broches va sur HIGH ou LOW.
gestionnaire : Cette fonction sera appelée une fois qu'une interruption sera déclenchée.
3 : Interfaçage du capteur PIR avec ESP32
Comme nous avons maintenant couvert les concepts d'interruption avec ESP32 en utilisant MicroPython, nous allons maintenant interfacer le capteur PIR avec ESP32. Ici nous allons utiliser Pin.IRQ_RISING mode dans le code MicroPython pour le capteur PIR car nous voulons déclencher une LED chaque fois que le capteur PIR détecte un mouvement. Cette LED restera allumée pendant une durée définie puis s'éteindra.
Les composants suivants seront nécessaires :
- Carte de développement ESP32
- Détecteur de mouvement IRP (HC-SR501)
- Résistance 220 Ohms
- Fils de liaison
- Planche à pain
- LED
Schématique pour capteur PIR avec ESP32 :
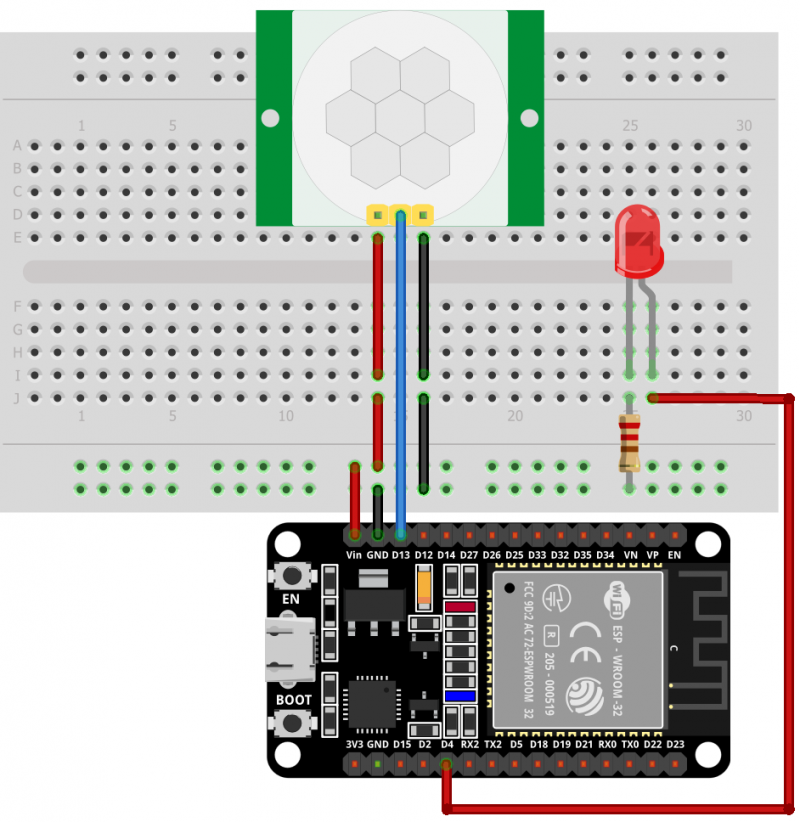
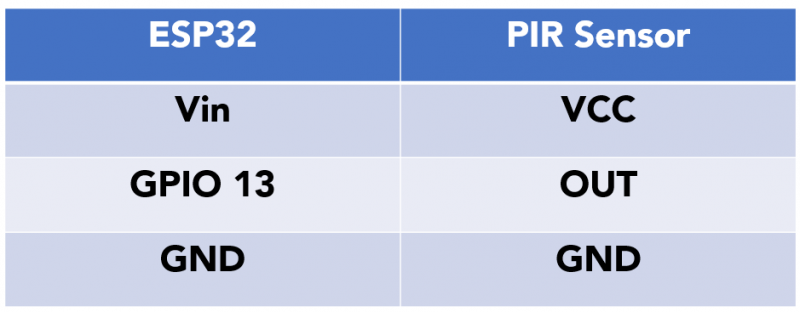
La configuration des broches de l'ESP32 avec capteur PIR est :
3.1 : Capteur de mouvement PIR (HC-SR501)
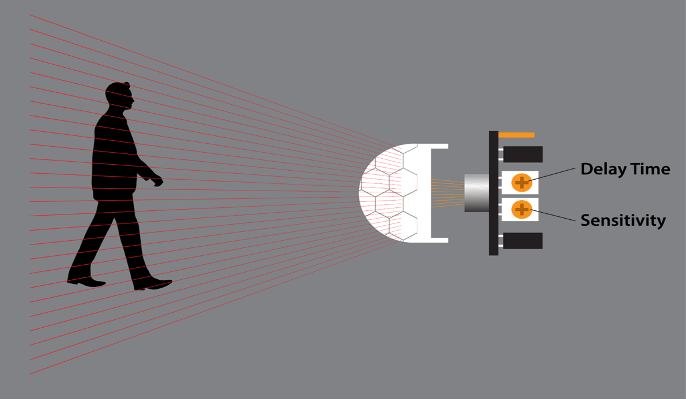
PIR est un acronyme pour Capteurs infrarouges passifs . Deux capteurs pyroélectriques utilisés ensemble qui détecteront la quantité de chaleur autour de son environnement. Ces deux capteurs pyroélectriques se trouvent l'un après l'autre et lorsqu'un objet arrive à leur portée, un changement d'énergie thermique ou la différence de signal entre ces deux capteurs fait que la sortie du capteur PIR est FAIBLE. Une fois que la broche de sortie PIR passe au niveau BAS, nous pouvons définir une instruction spécifique à exécuter (la LED clignote).
Voici les caractéristiques du capteur PIR :
- La sensibilité peut être réglée en fonction de l'emplacement du projet (comme la détection du mouvement de la souris ou des feuilles)
- Le capteur PIR peut être réglé pour combien de temps il détecte un objet
- Largement utilisé dans les alarmes de sécurité à domicile et d'autres applications de détection de mouvement à base thermique.
3.2 : Brochage HC-SR501
Le PIR HC-SR501 est livré avec trois broches. Deux d'entre elles sont des broches d'alimentation pour Vcc et GND et une est la broche de sortie pour le signal de déclenchement.
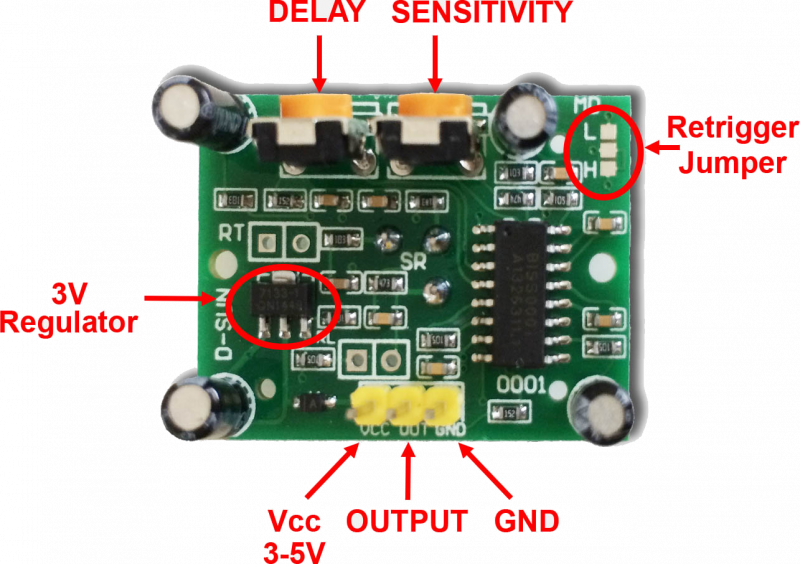
Voici la description des broches du capteur PIR :
| Broche | Nom | La description |
| 1 | Vcc | Broche d'entrée pour capteur Connecter à ESP32 Vin Pin |
| deux | DEHORS | Sortie du capteur |
| 3 | Terre | Terre du capteur |
Maintenant, pour programmer ESP32, écrivez le code donné dans l'éditeur Thonny IDE ou tout autre IDE MicroPython et téléchargez-le sur ESP32.
de l'importation de la machine Pinde temps importer le sommeil
mouvement = Faux
def handle_interrupt ( broche ) :
mouvement global
mouvement = Vrai
interruption_pin globale
interruption_pin = broche
LED = Broche ( 4 , Broche. DEHORS )
le pont = Broche ( 13 , Broche. DANS )
le pont. irq ( gâchette = Broche. IRQ_RISING , gestionnaire = handle_interrupt )
tandis que Vrai :
si mouvement :
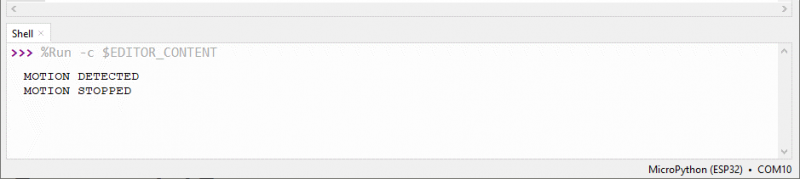
imprimer ( 'MOUVEMENT DETECTE' )
LED. évaluer ( 1 )
dormir ( 5 )
LED. évaluer ( 0 )
imprimer ( 'MOUVEMENT ARRÊTÉ' )
mouvement = Faux
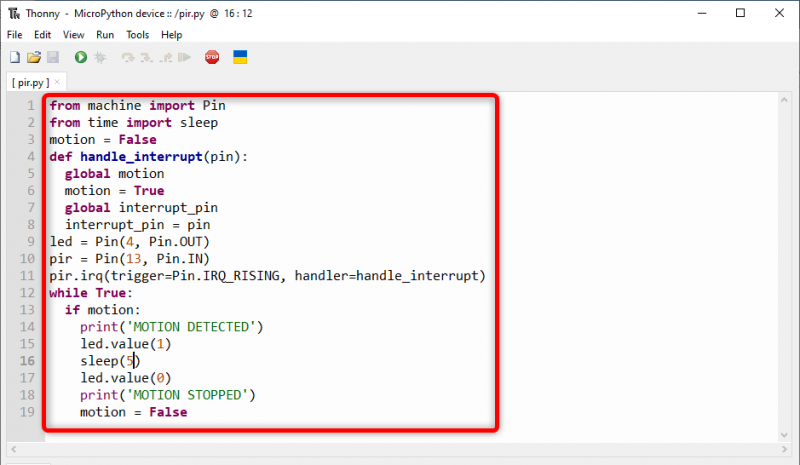
Tout d'abord, nous avons importé le broche classe du module machine et dormir méthode pour ajouter du retard. Ensuite, une variable est créée avec le nom mouvement. Cette variable détectera si un mouvement est détecté ou non.
Ensuite, nous avons créé une fonction handle_interrupt. Chaque fois que le capteur PIR détecte un mouvement, cette fonction sera activée. Il prend une broche comme paramètre d'entrée et indique la broche qui provoque l'interruption.
En termes simples, chaque fois que le PIR détecte un mouvement, handle_interrupt définira la variable de mouvement sur vrai et stockera la broche qui provoque l'interruption. Une chose à retenir déclare toujours le mouvement variable comme globale car elle est nécessaire dans tout le code.
À l'avenir, nous avons créé deux objets de broche, un pour stocker les broches LED et le second prendra la sortie du capteur PIR sur la broche GPIO 13. De plus, nous avons déclaré la broche de déclenchement dans EN HAUSSE mode.
Dans le boucle une partie du code, il vérifiera la valeur de la variable de mouvement une fois qu'elle deviendra vraie, la LED s'allumera connectée à la broche 4 de l'ESP32. Si le mouvement s'est arrêté, la LED s'éteindra après 5 secondes.
3.4 : Sortie
Dans la section de sortie, nous pouvons voir que l'objet est hors de portée du capteur PIR, donc le LED est tourné À L'ARRÊT .
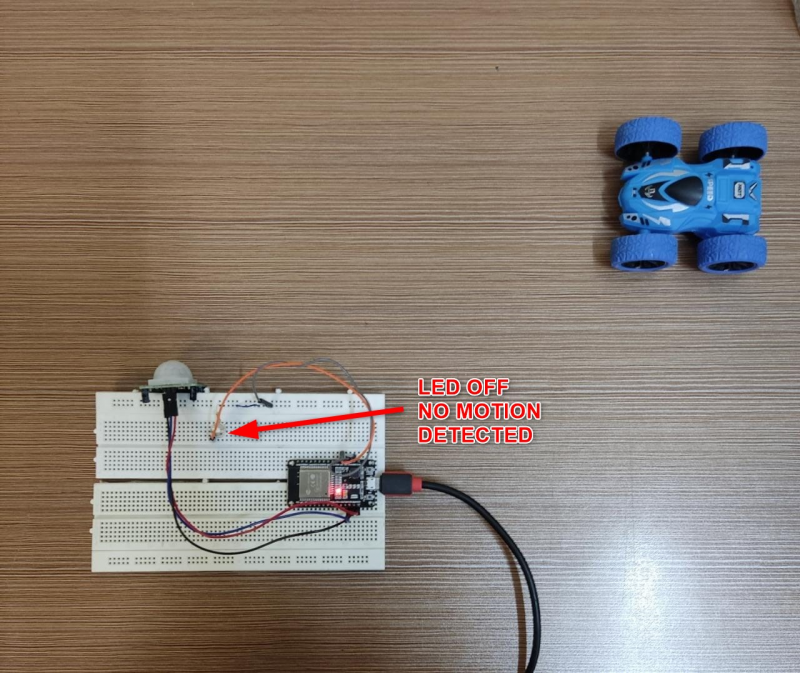
Maintenant, le mouvement détecté par la LED du capteur PIR s'allumera SUR pour 5 seconde après cela, si aucun mouvement n'est détecté, il restera À L'ARRÊT jusqu'à ce que le déclenchement suivant soit reçu.
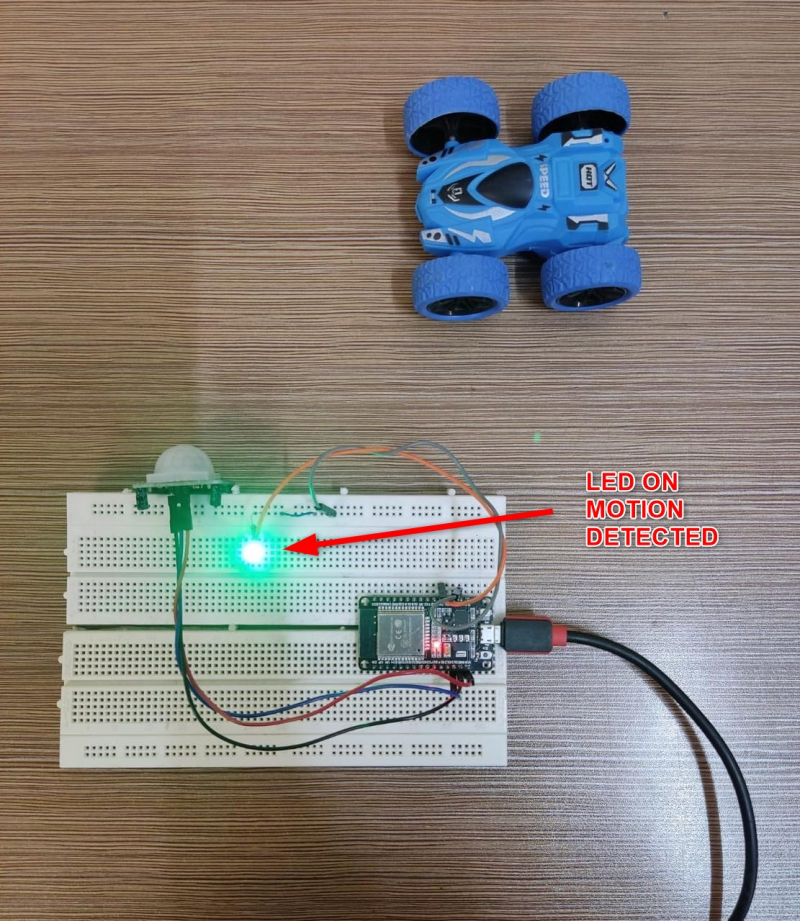
La sortie suivante est indiquée par le coque/terminal dans Thonny IDE.
Conclusion
Un capteur PIR avec ESP32 peut aider à détecter le mouvement de différentes choses. En utilisant la fonction d'interruption dans MicroPython avec ESP32, nous pouvons déclencher une réponse sur une broche GPIO spécifique. Lorsqu'un changement est détecté, la fonction d'interruption est déclenchée et une LED s'allume.